D4.1: Sub-system for 3D Simulation, Visualization and Interfacing with the User
Nov 1, 2016·,,,,,,,,·
1 min read
Christian Schlette
Eric Guiffo Kaigom
Marc Priggemeyer
Daniel Losch
Georgij Grinshpun
Ralf Waspe
Jürgen Roßmann
Barry Ridge
Minija Tamošiūnaitė
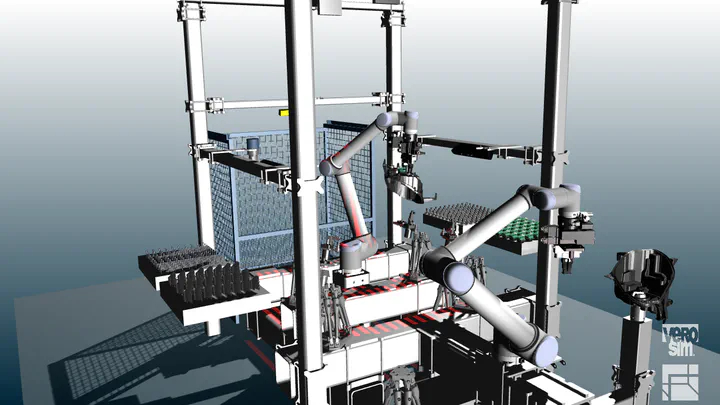 Design study of the ReconCell system, consisting of two manipulators (here two Universal Robots UR10 equipped with gripper systems by Schunk), passive hexapod fixtures which are reconfigurable by the robots and a frame for cameras and other sensors (here two combinations of Point Grey Bumblebees and Microsoft Kinects) which are also reachable and reconfigurable by the robots.
Design study of the ReconCell system, consisting of two manipulators (here two Universal Robots UR10 equipped with gripper systems by Schunk), passive hexapod fixtures which are reconfigurable by the robots and a frame for cameras and other sensors (here two combinations of Point Grey Bumblebees and Microsoft Kinects) which are also reachable and reconfigurable by the robots.